Cánh tay Robot (Robot Arm):
- Cánh tay robot là thành phần chính của hệ thống phân loại. Nó được trang bị các cảm biến và bộ công cụ (gripper) để cầm nắm và phân loại các vật phẩm.
- Cánh tay robot có khả năng di chuyển theo các trục (X, Y, Z), cho phép thực hiện các thao tác linh hoạt như gắp, đặt, xoay và phân phối vật phẩm tới các khu vực khác nhau.
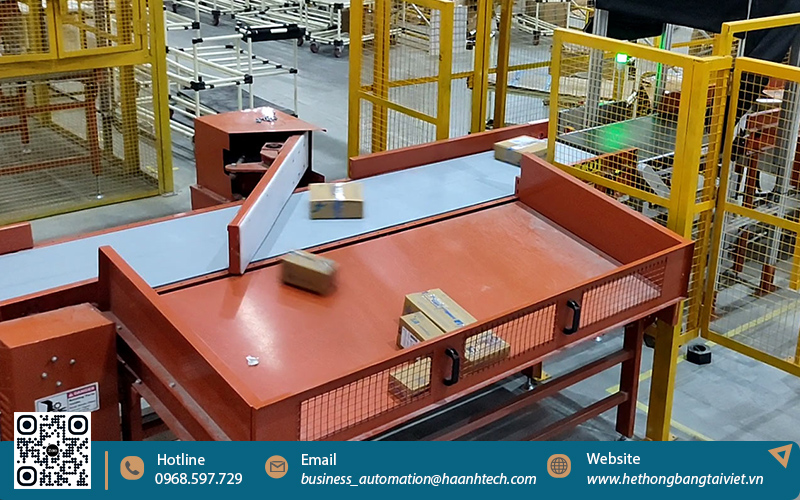
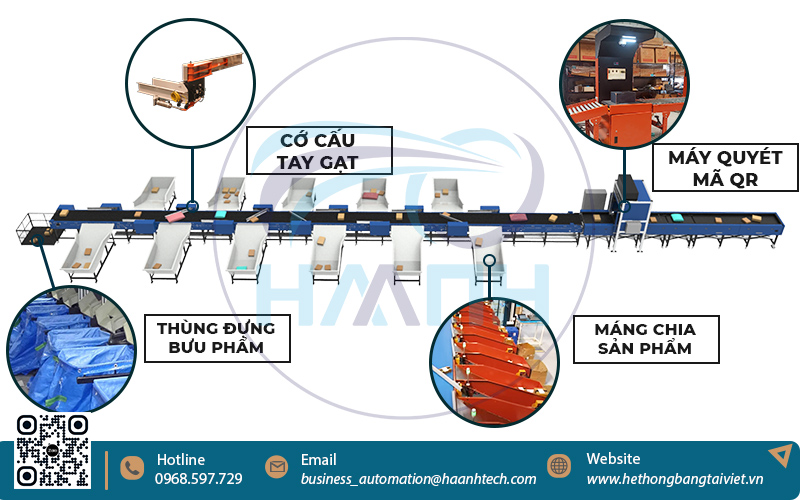
Hệ thống nhận diện và phân loại:
- Hệ thống sử dụng các cảm biến như camera, cảm biến laser hoặc hệ thống nhận diện hình ảnh để phân loại các vật phẩm dựa trên thông số đã định trước.
- Ví dụ, hệ thống có thể nhận diện mã vạch, nhận diện màu sắc hoặc kích thước để phân loại sản phẩm.
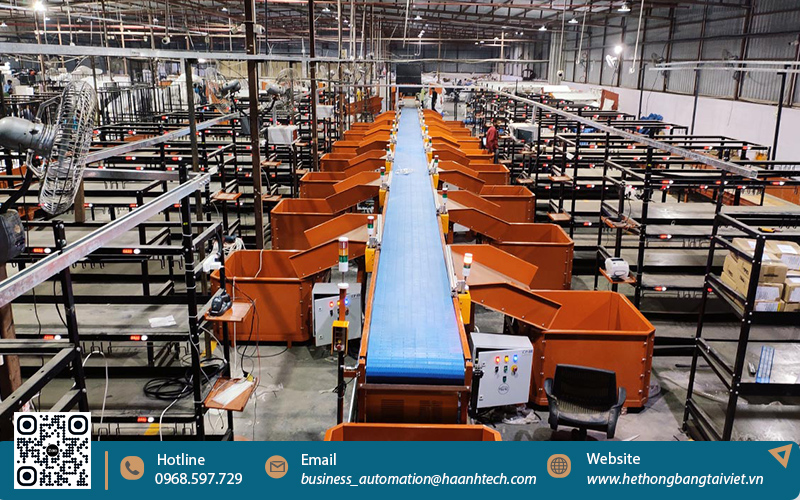
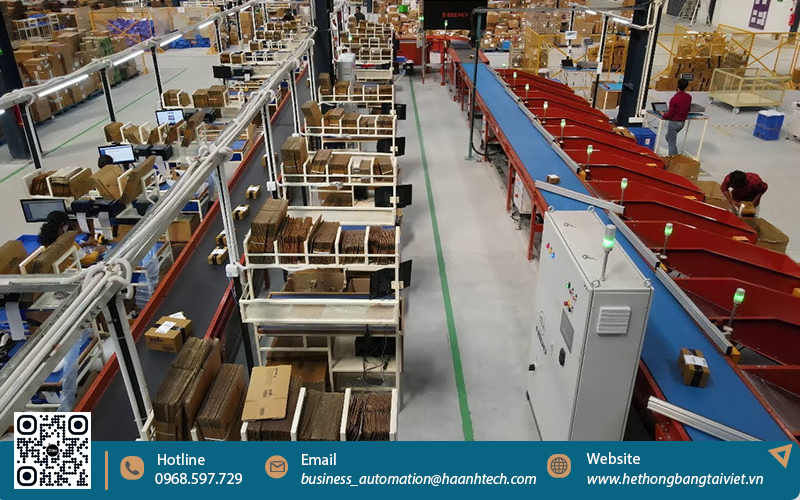
Băng tải (Conveyor Belt):
- Băng tải giúp di chuyển các vật phẩm đến khu vực phân loại, nơi cánh tay robot hoặc các cơ chế tự động khác có thể xử lý và chuyển đến các điểm đích đã định.
Phần mềm điều khiển:
- Hệ thống phân loại thường được điều khiển qua phần mềm tự động hóa, giúp điều phối tất cả các thành phần như robot, cảm biến, và băng tải để đảm bảo hiệu quả làm việc tối ưu.
- Phần mềm có thể sử dụng các thuật toán AI để tối ưu hóa quy trình phân loại, giảm thiểu lỗi và tăng năng suất.